

Mike DonnellyA Linear Variable Differential Transformer (LVDT) and analog signal conditioning circuit are used for a position sensing system...

Mike DonnellyThis design shows a stepper motor's ability to control a load angle, not by using a rotation angle sensor for feedback, but rather...

Mike DonnellyThis example shows a VCA driven motion control loop that is acting through an equivalent model of a flexible mechanical structure...


DarrellPIDF feedback control theory for FRC motor speed control
See blog for detailed information
Controlling Motors with the Talon SRX
Featured Article | Darrell | 1 February 2017Do you struggle to understand how to use the Talon SRX controller effectively? What is PID and PIDF? How does feedback control work? What is feed-forward control? How are values of P, I, D, & F determined? How is the new Talon SRX "motion profile" feature supposed to be used?
If these are your questions, this blog is for you.
Electric Power Steering - Coordinated Control, Electronics and Motor Design
Featured Article | Mike Donnelly | 21 April 2018TElectric Power Steering (EPS) systems provide a challenging control design problem for system integrators. Because the system directly interacts with the driver’s hands, reducing vibration is a must. But controlling the system’s fundamental mechanical resonance requires loop compensation, such as lead, which can make the system sensitive to higher frequency disturbances (1). This can include cogging and torque ripple from the motor, or commutation noise from the drive electronics. For this reason, it is essential to have a tool flow that supports a coordinated design effort across these technologies.
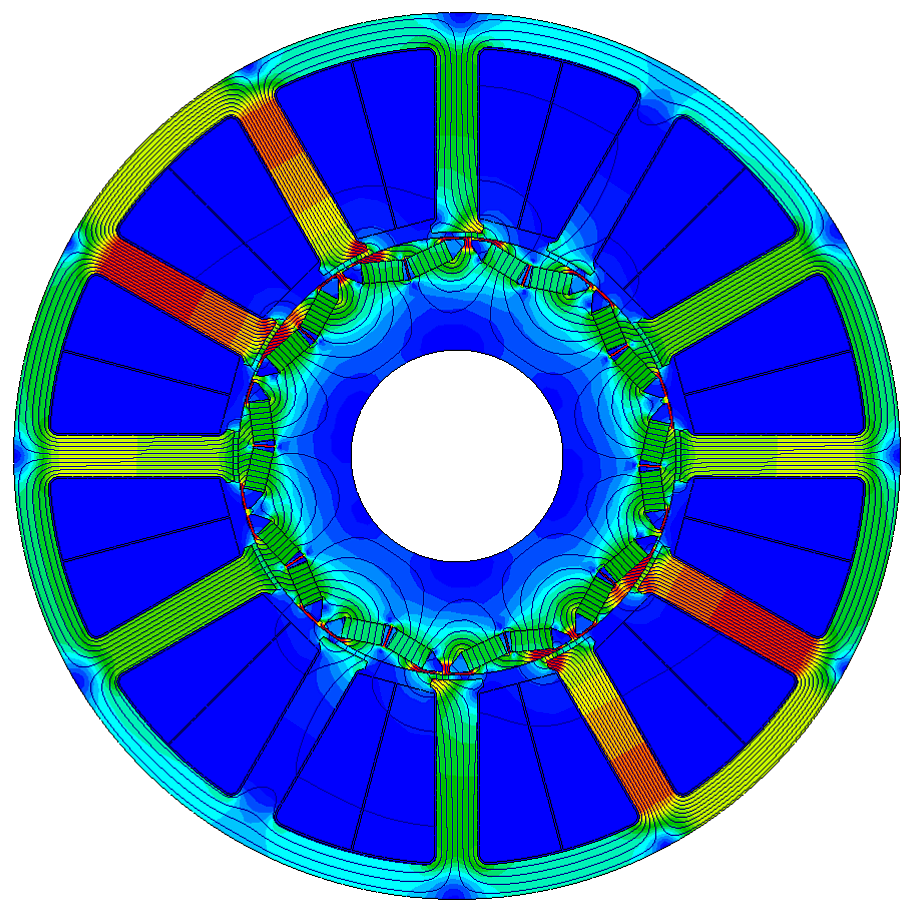
MotorSolve B-field Analysis of the EPS PMSM Motor